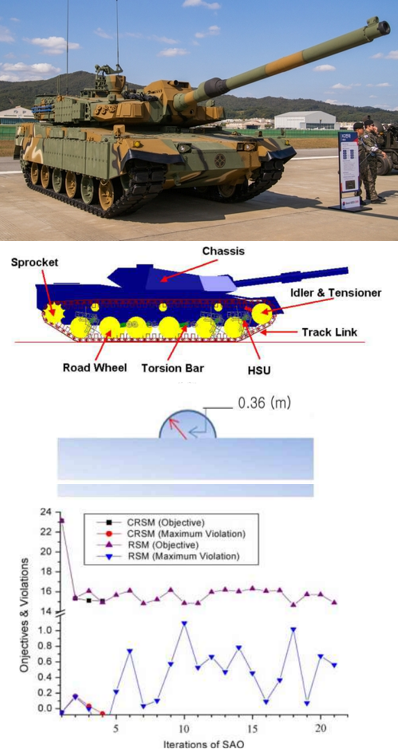
The example discusses the design of a tracked vehicle suspension system aiming to minimize extreme acceleration when encountering a bump at 40 km/h. The system includes hydraulic suspension units (HSUs), torsion bars, and various design variables. Constraints are placed on mass center acceleration, wheel travel, and static wheel loads. RecurDyn software is used for dynamic analysis, with 34 analyses required for the design problem.
The method used is called "conservative response surface models (CRSMs)" which addresses convergence issues, and "incomplete small composite designs (ISCDs)" help reduce the number of runs. The CRSM combined with ISCDs, using Singular Value Decomposition (SVD), is applied successfully to solve a tracked vehicle suspension design problem with 9 variables, requiring only 34 analyses. The proposed method provides a unique and economic design solution.
In summary CRSMs and ISCDs are methods to improve the design process for tracked vehicle suspension systems, solving a complex design problem with reduced computational effort.