Dynamic Analysis of Wearable Robots with Human Body Modeling
Establishing Human Body Models for Wearable Robotics
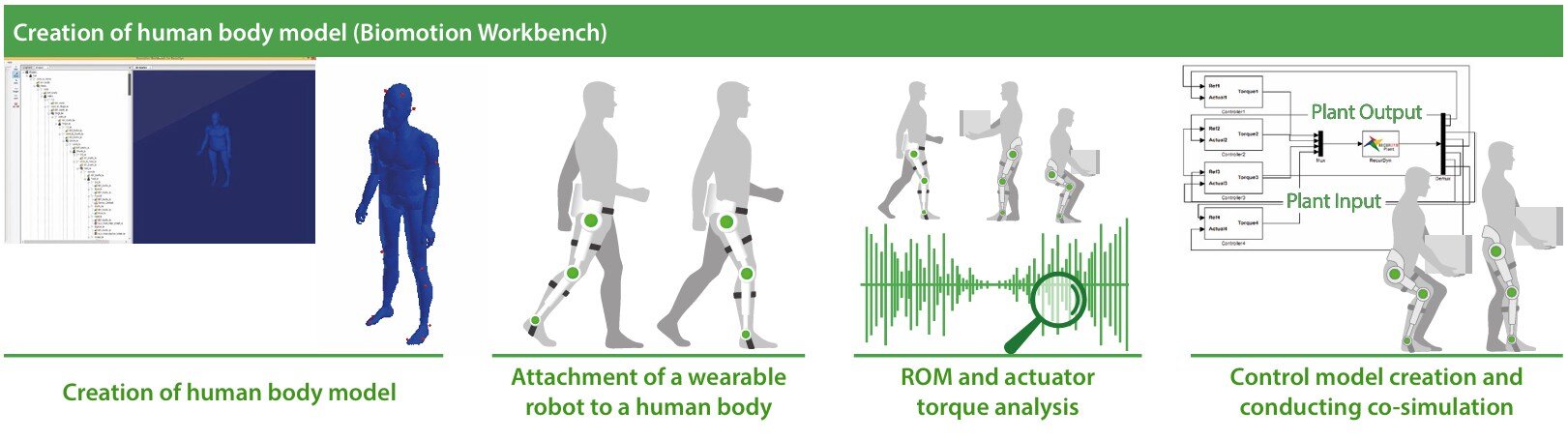
Creating an accurate dynamic model of the human body is the foundation for designing wearable robots. Using tools like Bio-motion and RecurDyn, human body motion data is captured and converted into realistic models. These models are essential for ensuring compatibility and functionality when the wearable robot is attached.

Simulating Wearable Robot Motion and Range of Motion (ROM)
By attaching wearable robots to the human body model, simulations are conducted to evaluate the robot's range of motion and the torque requirements for various actuators. This process ensures that the robot can perform necessary movements without overloading its components, optimizing both design and functionality.